
سلام بر برنامه نویسان عزیز ایران زمین 😉 در این مطلب سورس کد یافتن محدوده Laser با استفاده از وب کم در c# را آماده کردم. انشاالله که این سورس کد براتون مفید باشد.
- عنوان سورس کد : یافتن محدوده Laser با استفاده از webcam
- id مطلب :22138810
- تاریخ منتشر شدن پست : هشت آبان 96 ساعت 13 و 52دقیقه
- نوع مطلب :مطلب ویژه برای کاربران vip
- حجم فایل: 447 کیلوبایت
- فرمت فایل: zip
- تگ ها: کار با لیزر در سی شارپ | #C
- در صورت وجود هر گونه مشکل یا نقصی در این پروژه ، میتوانید با ارسال شماره کارت تان و اعلام مشکل موجود در پروژه ، مبلغ پرداختی خود برای عضویت vip را پس بگیرید و همچنین 2 ماه عضویت vip هدیه بگیرید.
تعدادی از فایلهای درون فایل فشرده پروژه:فولدرها:
- AForge.Controls.dll
- AForge.dll
- AForge.Imaging.dll
- AForge.Math.dll
- AForge.Video.DirectShow.dll
- AForge.Video.dll
- Laser Range Finder.exe
- Laser Range Finder.vshost.exe.manifest
- AForge.Controls.dll
- AForge.dll
- AForge.Imaging.dll
- AForge.Math.dll
- AForge.Video.DirectShow.dll
- AForge.Video.dll
- Laser Range Finder.exe
- Laser Range Finder.vshost.exe
- Laser Range Finder.vshost.exe.manifest
- Laser range FinderEXE.zip
- AssemblyInfo.cs
- Resources.Designer.cs
- Resources.resx
- Settings.Designer.cs
- CalibrationData.cs
- CameraSource.cs
- CameraSource.Designer.cs
- CameraSource.resx
- ColorData.cs
- ColorTune.cs
- ColorTune.Designer.cs
- ColorTune.resx
- Form1.cs
- Form1.Designer.cs
- Form1.resx
- Laser Range Finder.csproj
- Program.cs
- Laser Range Finder.sln
- Laser Range Finder
- bin
- Debug
- Laser range Finder
- Properties
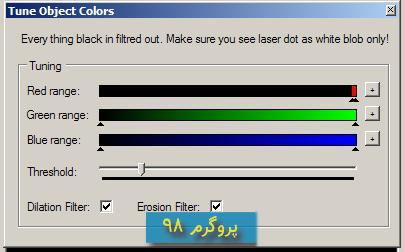
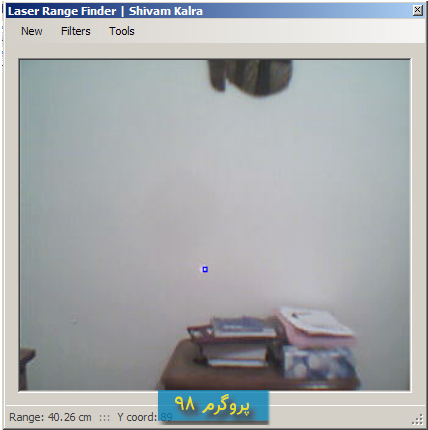
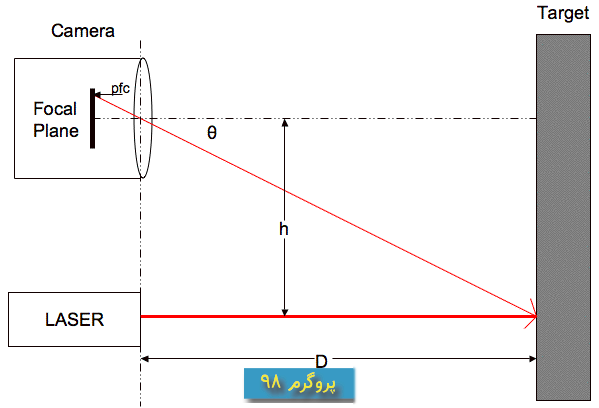
تصاویر مربوط به این پروژه :


















یک 1 نظر
ali
…
با استفاده از ترجمه ماشینی:
مقدمه
این روزها ، بسیاری از دستگاههای مسیریاب وجود دارند که تقریبا در همه جا از رباتیک به سیستم دفاعی country’s استفاده میشوند . تمام این دستگاهها به خوبی کار میکنند ، اما در کاربردهای کلی روباتیک ، concerns و هزینههای حمل و نقل وجود دارد . از مقالههای قبلی من ، من برنامههای جالب مربوط به وب سایت را ایجاد کردهام و حالا با یک محدوده دوربین اینترنتی لیزری بزرگشدهام . این میتواند نشان دهد که یک شی تنها با استفاده از قلم لیزری بسیار ارزان و یک دوربین معمولی است .
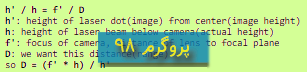
از آنجایی که تمرکز دوربین در فواصل کوچک تغییر نمیکند ، لیزر ثابت است و ارتفاع آن تغییر نمیکند بنابراین همه چیز در اینجا ثابت است ( ارتفاع تصویر ) . ما رابطه مان را که D با h رابطه معکوس دارد ، بدست میآوریم .